itmo_conspects
Лекция 4. Сверточные нейронные сети
Свертка - это операция, при которой к входной матрице (например, изображению) применяется ядро (или фильтр) - небольшая матрица весов. Каждый элемент результата получается как сумма поэлементных произведений фрагмента входа и ядра - то есть линейная операция, выделяющая локальные признаки
Ядро свертки может быть тензором одномерным, двумерным, трехмерным и так далее в зависимости от размерности входных данных
Примерами свертки являются:
- Размытие
- Оператор Собеля
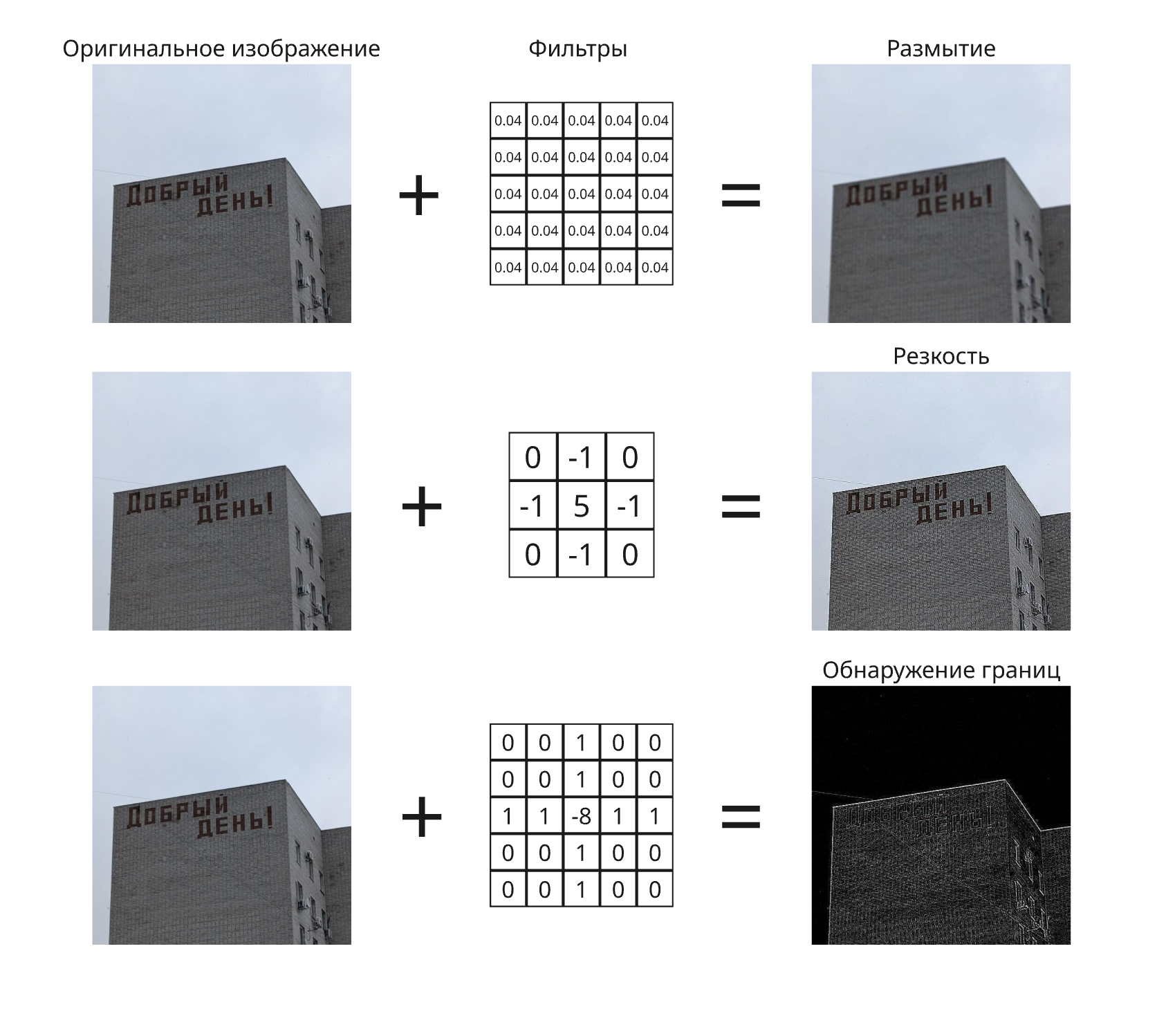
В сверточных нейросетях фильтры не задаются вручную, а обучаются под конкретную задачу
Но во время свертки появляются проблемы:
-
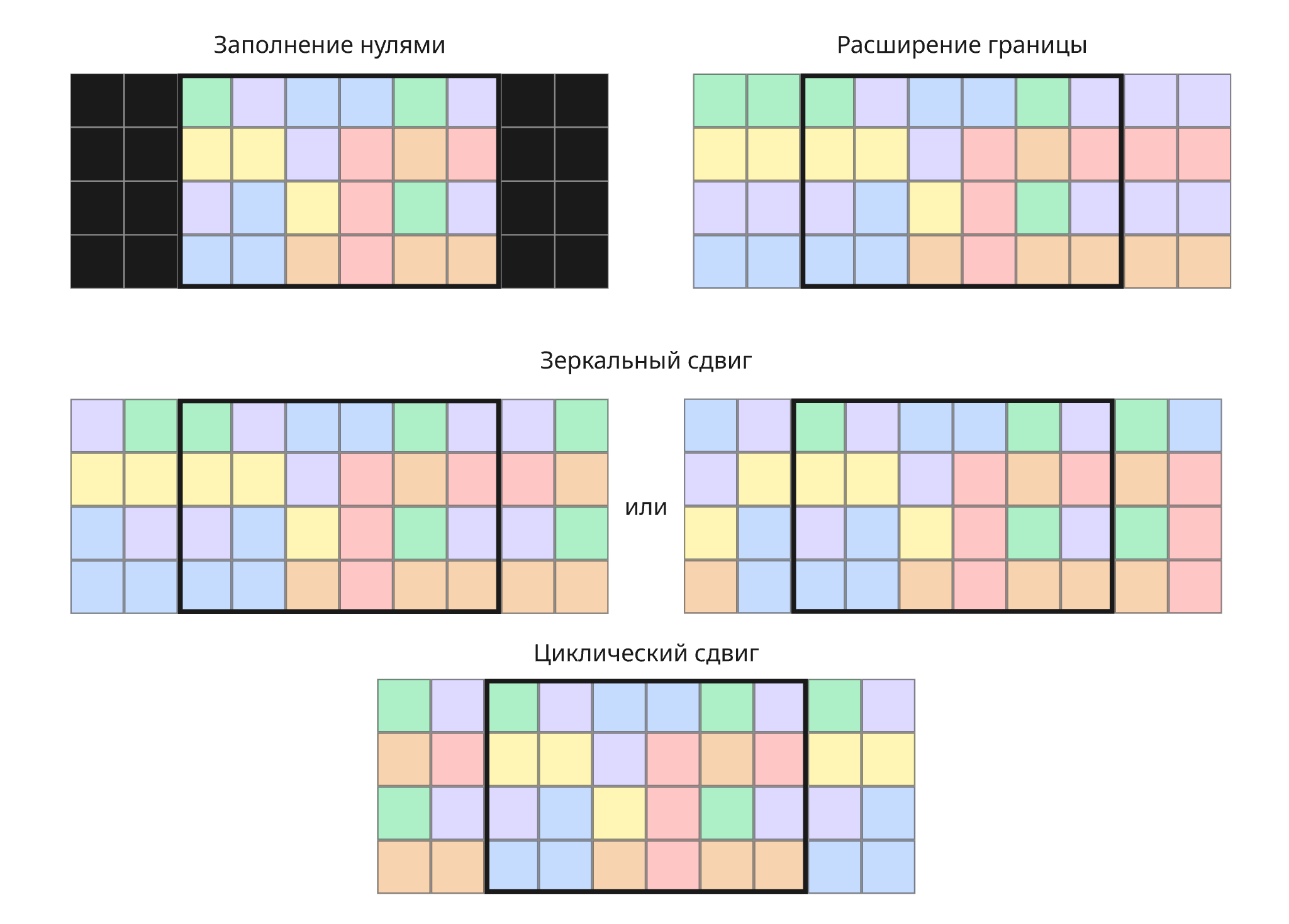
После свертки мы получаем матрицу меньшего размера. Чтобы исправить это, применяют отступ - заполнение значениями за границей матрицей:
-
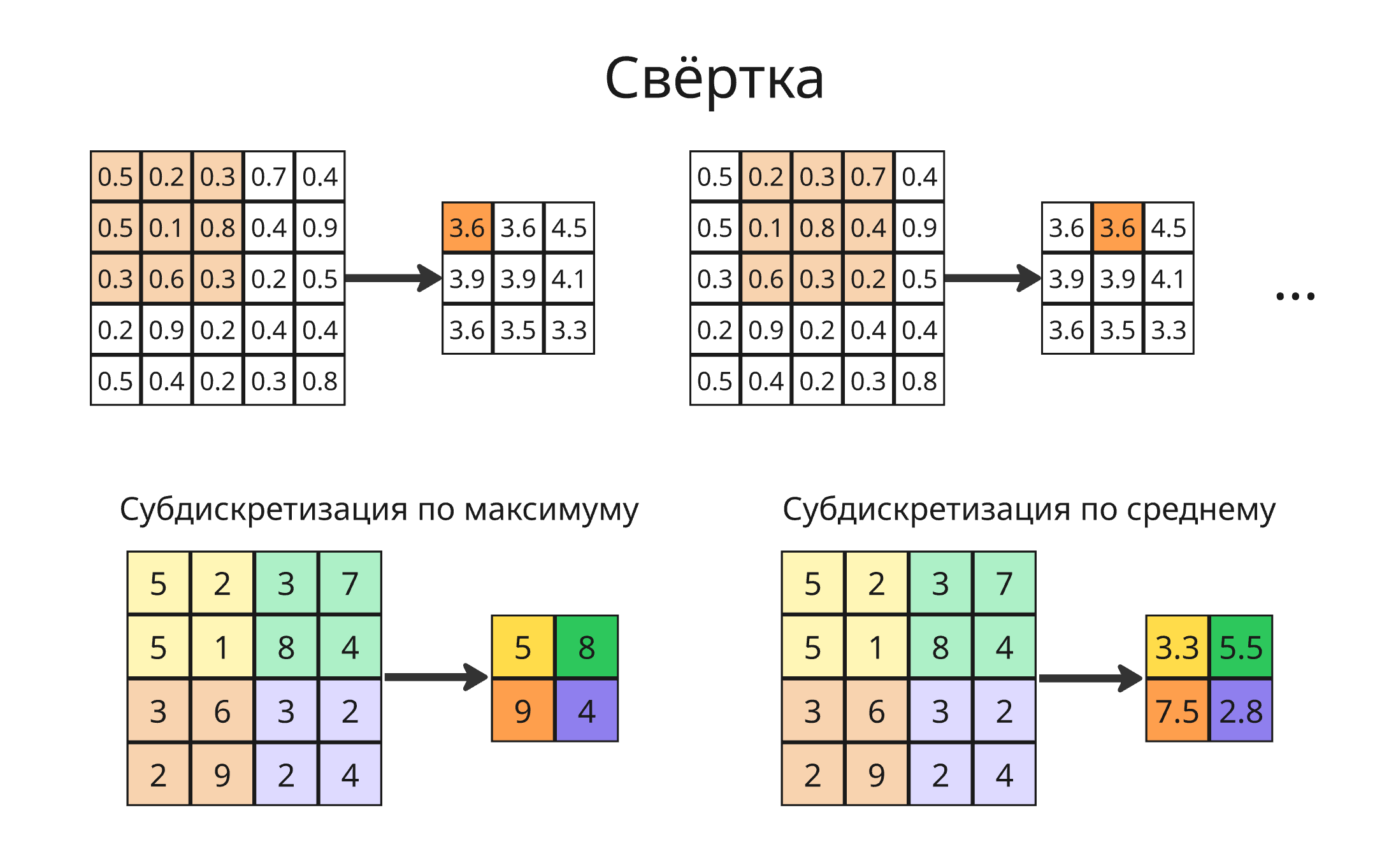
Для того, чтобы ускорить свертку, матрицу свертки можно применять не через каждый пиксель, а через каждые несколько пикселей. Это значение называют шагом (или страйдом, от stride) свертки
Ширина матрицы после свертки определяется так – $O = \frac{I - K + 2 P}{S} + 1$, где $I$ – ширина исходной матрицы, $K$ – размер ядра, $P$ – добавленный отступ, $S$ – шаг свёртки
Для уменьшения размерности матрицы применяют субдискретизацию (или пулинг, от pooling) – в участке матрицы выбирается одно значение в зависимости от тех, что находятся в этом участке. Применяют пулинг по среднему значению или по максимуму
Пулинг прекрасен тем, что у него нет обучаемых параметров
Для борьбы с переобучением в сверточных нейросетях применяют индивидуальную нормализацию (Instance normalization), где она происходит по каждому отдельному объекту
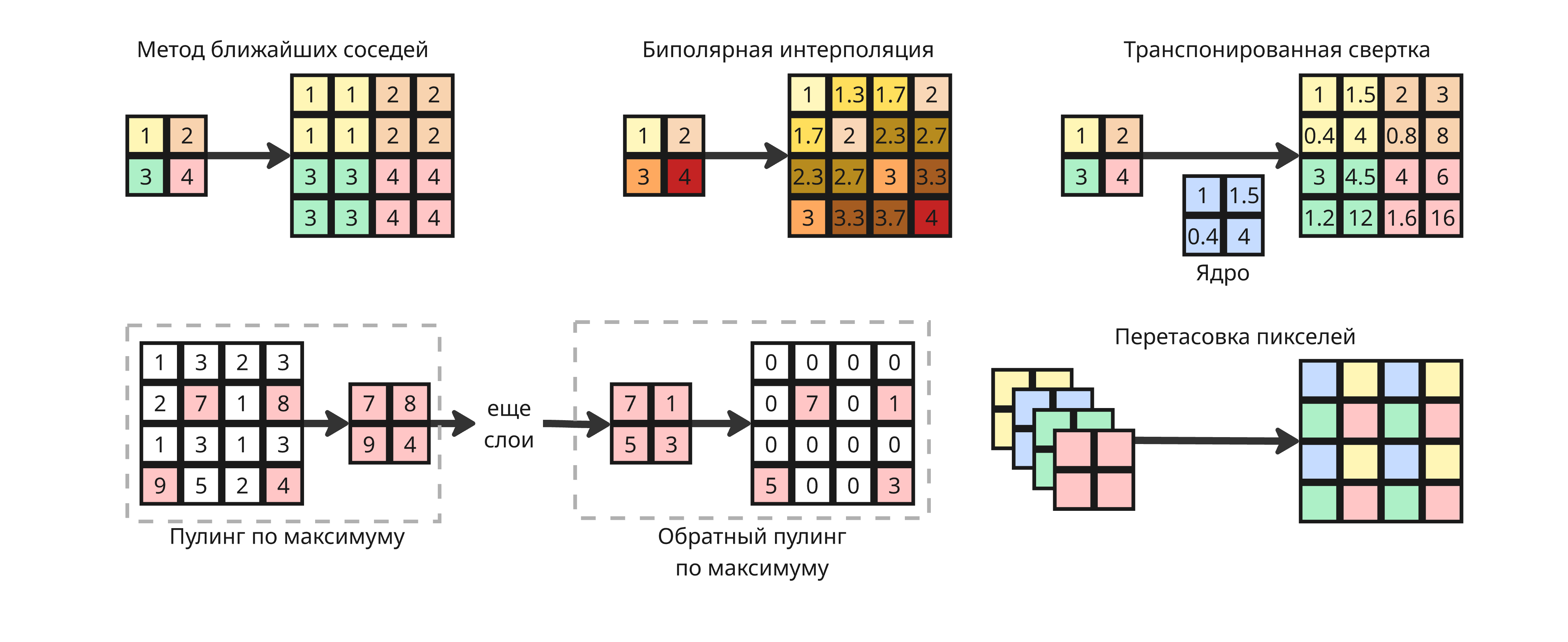
\[\mu_{ni} = \frac{1}{HW} \sum_{l=1}^{H} \sum_{m=1}^{W} x_{nilm}\]Для увеличения изображения применяют:
- Метод ближайших соседей - каждый пиксель просто копируется в соседние
- Билинейная интерполяция - значения интерполируются по пикселям
- Обратный пулинг по максимуму (Max Unpooling) - во время пулинга по максимуму запоминаем, какой элемент в области был максимумов, и после слоев в конце кладем соответствующие числа в их прошлые места, а остальные заполняем нулями
- Перетасовка пикселей (Pixel Shuffle) - если есть четырехслойное изображение размером $n \times n$, то можно сделать один слой $2n \times 2n$, перемешав пиксели
- Транспонированная свертка (Transposed convolution) - обучаемая операция, обратная свёртке, она увеличивает размер с помощью изучаемых весов
Популярным примером сверточной нейросети является LeNet-5, которая использовалась для распознавания рукописных цифр. Ее архитектура показывает типичную структуру CNN: чередование сверточных и субдискретизирующих слоев, затем полносвязные слои
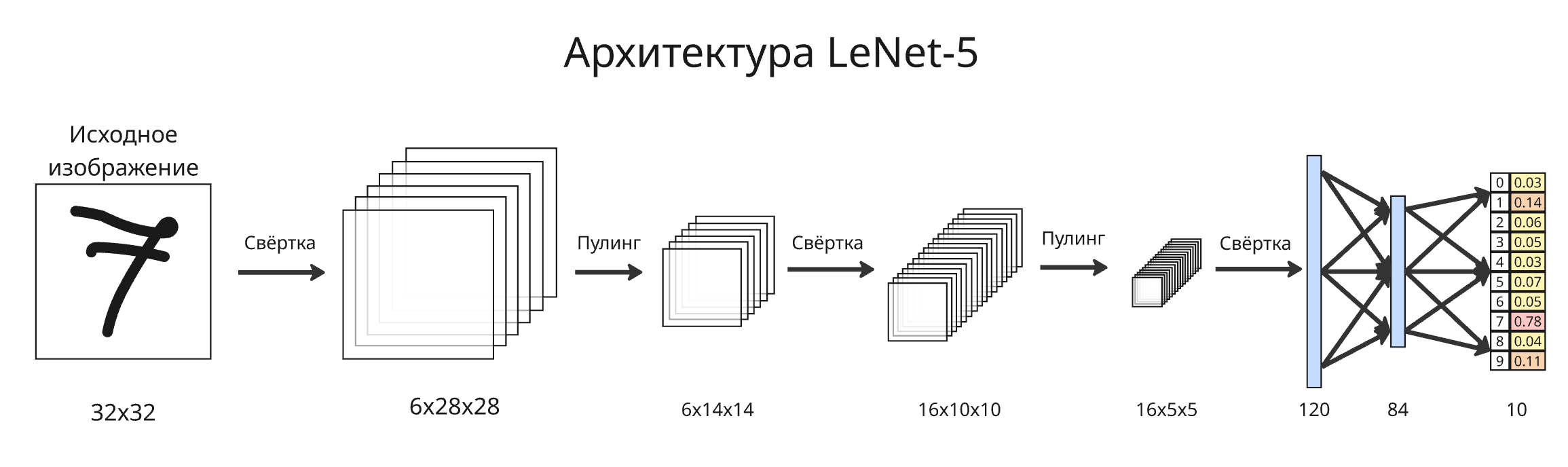
На первых слоях сеть выделяет простые, малые признаки (края, углы, цветовые переходы). На следующих слоях из них собираются более сложные признаки (формы, части объектов), а в конце - целые объекты
Основными идеями обработки изображений в сверточных нейросетях являются:
- Локальность восприятия - свёртка действует на малую часть изображения, а не на всё сразу
- Общие параметры - одно ядро применяется ко всему изображению, что резко сокращает число параметров
- Уменьшение размерности - пулинг снижает пространственный размер карт признаков
- Разреженность связей: выходное значение зависит от малого числа входов
Как рассматривалось ранее, основными задачи анализа изображения являются:
- Классификация - определение класса объекта на изображении
- Обнаружение объектов - классификация и локализация объектов
- Сегментация, она бывает нескольких типов:
- Семантическая сегментация - выделение объектов разных класса
- Сегментация сущностей - выделение отдельных объектов одного класса
- Паноптическая сегментация - выделение отдельных объектов разных классов (например, фоновые области в виде деревьев и отдельные автомобили)
В последнее время, с развитием Интернета и технологий, тренировочных данных стало кратно больше. Если раньше надо было своими силами создавать датасеты, то сейчас для обучения можно использовать:
- Существующие наборы данных с готовой разметкой
- Синтетические данные, например, помещение объектов на панорамные изображения
- Аугментация данных - легкая модификация существующих данных. В контексте изображений используются:
- Изменение цветов
- Поворот вокруг точки или осевая симметрия
- Размытие
- Сдвиг и обрезка
- Сжатие и растяжение
-
Сбор своих данных и их разметка. Часто есть хороший датасет, но он не содержит меток, из-за чего модель нельзя обучить их предсказывать
Хорошим подходом является разметка небольшой части данных, на которых можно протестировать эффективность и сделать Proof-of-Concept новой архитектуры модели
Самыми популярными датасетами являются:
- MNIST - набор черно-белых изображений 28x28 рукописных цифр, ~70000 изображения
- MNIST-Fashion - набор черно-белых изображений 28x28 предметов одежды, ~70000 изображения
- Imagenet - датасет из ~14 миллионов изображений различных объектов
- MS COCO (Microsoft Common Objects in Context) - датасет из 328000 изображений сложных повседневных сцен и объектов в естественном окружении
- CelebA и CelebAHQ (CelebFaces Attributes Dataset) - 200 тысяч изображений лиц знаменитостей с размеченными атрибутами (такими как наличие шляпы, усов и тому подобное)
- CityScapes - 5 тысяч изображений городских сцен с разметкой сущностей на них
- ADE20K - ~22 000 изображений с семантической разметкой сцен
- ICDAR 2003-2019 - семейство датасетов фотографий с текстом на английском языке
- COCO-Text - датасет из 63686 изображений для распознавания текста
- Total-Text - датасет из изображений текста произвольной формы (изогнутый, наклонный)
- DeepFashion2 - одежда с детальной разметкой
- Cat 256
- MVS Data Set
- 3D-FRONT
- LSUN
- Oxford Flowers 102 - датасет изображений цветов
- SynthText in the Wild - 800 тысяч синтетических изображений с текстом
- CARLA - библиотека для работы с городскими ландшафтами в 3D
Классификация
Для классификации применяют метрики из машинного обучения:
-
Аккуратность (Accuracy): $\displaystyle \mathrm{Accuracy} = \frac{\mathrm{TP} + \mathrm{TN}}{\mathrm{TP} + \mathrm{TN} + \mathrm{FP} + \mathrm{FN}}$
-
Точность (Precision): $\displaystyle \mathrm{Precision} = \frac{\mathrm{TP}}{\mathrm{TP} + \mathrm{FP}}$
-
Запоминание (или полнота, Recall): $\displaystyle \mathrm{Recall} = \frac{\mathrm{TP}}{\mathrm{TP} + \mathrm{FN}}$
-
F-мера (F-score или F1-score): $\displaystyle F_1 = \frac{2}{\frac{1}{\mathrm{Precision}} + \frac{1}{\mathrm{Recall}}} = \frac{2 \mathrm{Precision} \cdot \mathrm{Recall}}{\mathrm{Precision} + \mathrm{Recall}} = \frac{2\mathrm{TP}}{2\mathrm{TP} + \mathrm{FN} + \mathrm{FP}}$
В качестве функции потерь используют:
-
Для бинарной классификации бинарную перекрестную энтропию (BCE, Binary Cross-Entropy):
\[\mathcal{L}_{\mathrm{BCE}} (y, p) = -(y \log p + (1 - y) \log (1 - p)),\]где $y$ - точное значение класса ($0$ или $1$), а $p$ - вероятность принадлежности классу $1$
-
Для классификации в общем случае перекрестную энтропию (CE, Cross-Entropy):
\[\mathcal{L}_{\mathrm{CE}} (y, p) = -\sum_k y_k \log p_k\]
Рассмотрим популярные архитектуры таких сверточных сетей:
-
AlexNet - первая глубокая модель из 6 миллионов параметров, состоящая из 5 сверток и 2 пулингов, где в основном применяется функция ReLU
-
VGG16 и VGG19 - глубокие сети с сотнями миллионов параметрами с маленькими ядрами свёртки 3x3
-
ResNet
На практике глубокие сети не обучаются с ростом слоев
Остаточный блок - подход, где информация с одного слоя передается вперед через два слоя. Это позволило уменьшить число параметров, но увеличить эффективность
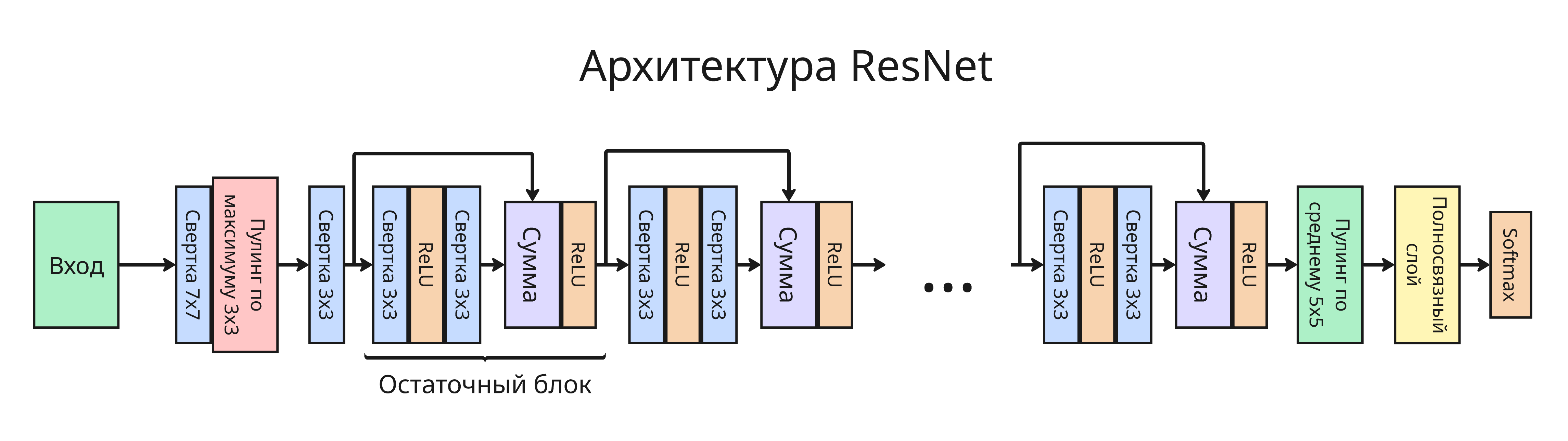
Также в ResNet применили поточечную свертку (свертка с ядром 1x1xN), позволяющая менять число каналов без изменения пространственного размера
-
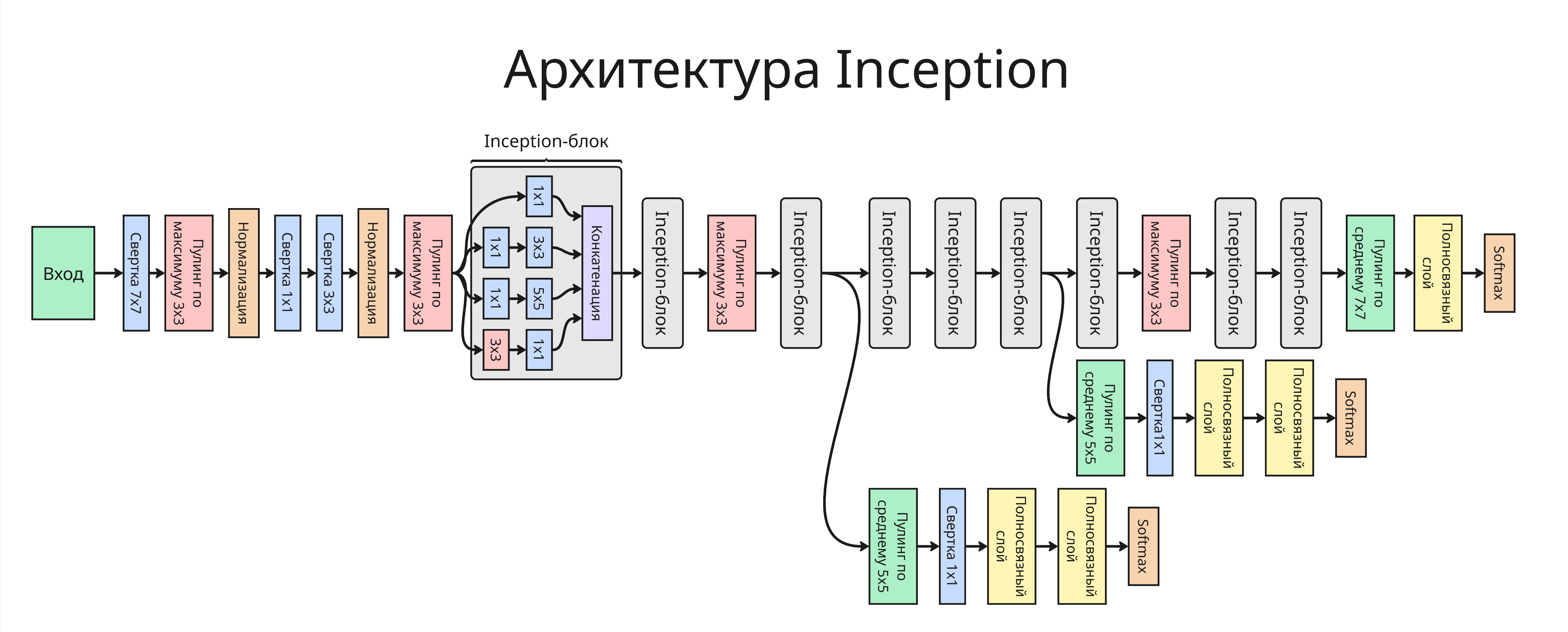
Inception (Inception v1-4, Inception-ResNet)
Ключевым решением является выбор числа фильтром. Увеличение числа фильтров позволяет выполнять сложные задачи, а уменьшение числа позволяет выполнять простые задания
Вместо этого можно применить Inception-блоки. В Inception-блоке параллельно применяются свёртки разных размеров (1x1, 3x3, 5x5) и пулинг. Результаты конкатенируются, а они в свою очередь позволяют модели самой выбирать нужный масштаб признаков
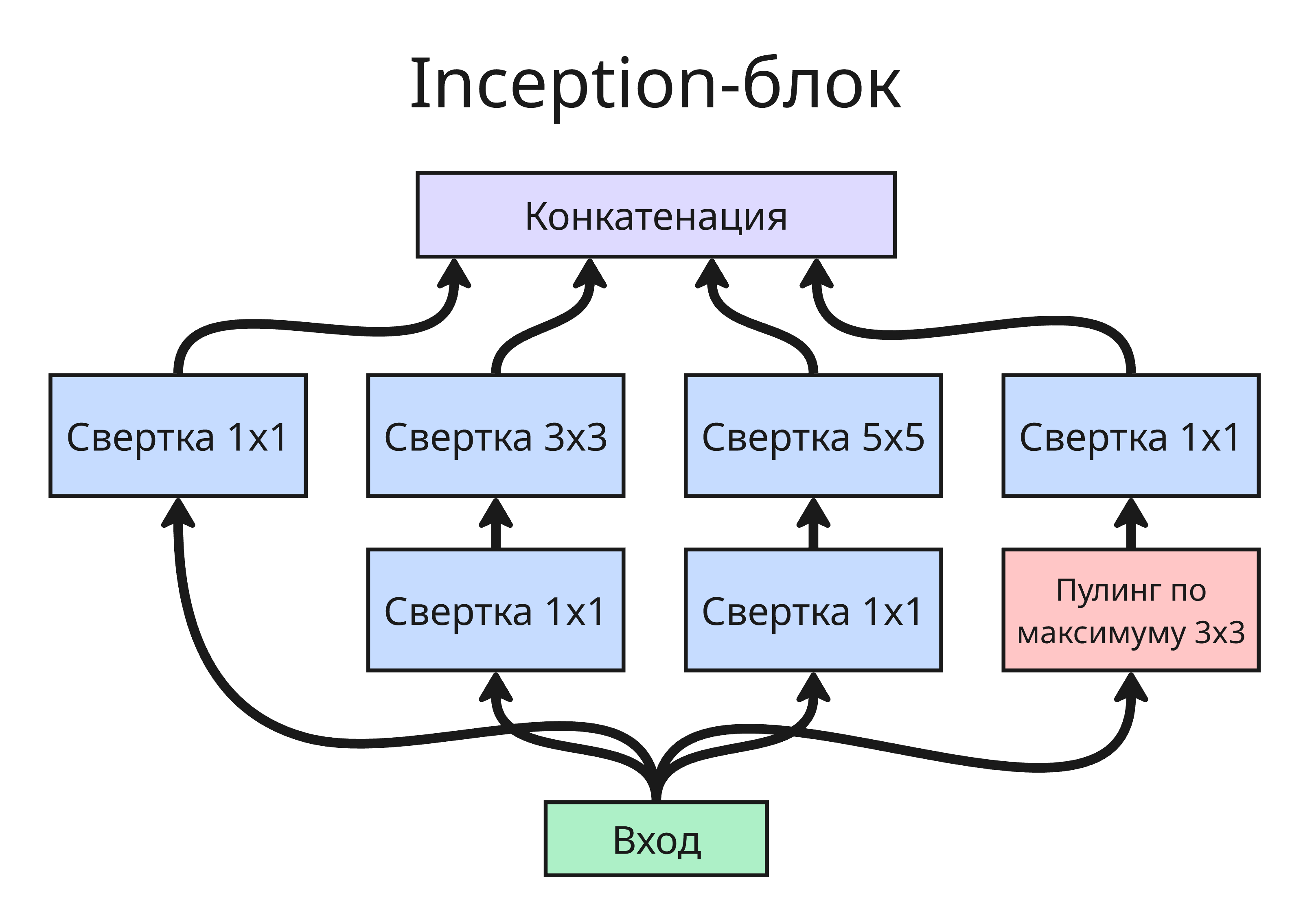
Также можно создавать вспомогательные выходы из Inception-блоки, чтобы бороться с затуханием градиента
-
MobileNet - лёгкая модель, разработанная для работы на мобильных устройствах. MobileNet использует алгоритм Depthwise Separable Convolution, разделяющую стандартную свёртку на два шага для резкого снижения числа вычислений
-
EfficientNet - семейство моделей, где глубина, ширина и разрешение входа масштабируются совместно с помощью составного масштабирования (Compound Model Scaling). Для каждой задачи подбирается нужный размер модели, что позволяет увеличить точность и эффективность
-
Vision Transformer (ViT) - модель, применяющая архитектуру трансформера
Изображение разбивается на патчи, каждый патч кодируется в вектор, и последовательность патчей подаётся на вход трансформеру с механизмом самовнимания
-
Swin Transformer (Shifted Windows Transformer) - модель, где самовнимание ограничено в пределах сдвигаемого окна, что снижает вычислительную сложность до линейной от размера изображения
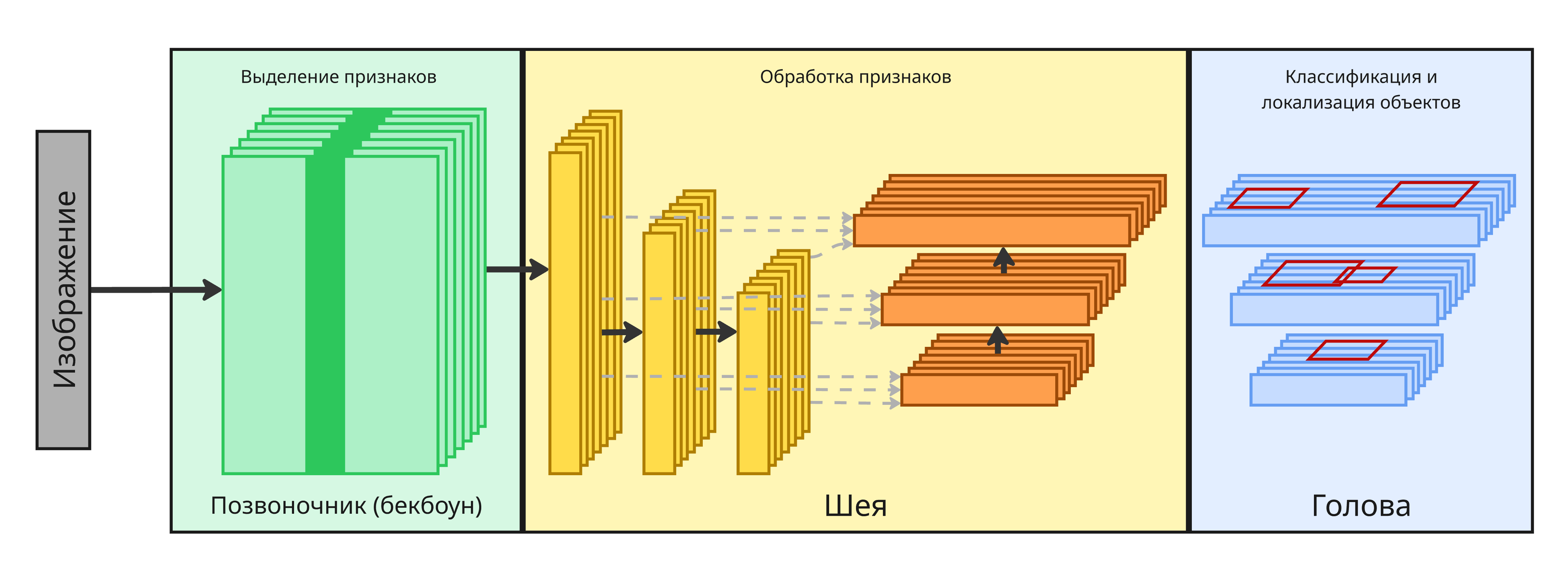
Сейчас современные модели часто строятся по трехуровневой архитектуре:
Backbone (бекбоун, позвоночник) - сеть для извлечения признаков изображения Neck (шея) - сеть для обработки признаков разных масштабов
Head (голова) - модель для получения результата для конкретной задачи
Такая архитектура позволяет заменять голову для решения разных задач, сохраняя общий бекбоун