itmo_conspects
Лекция 5. Процессы, часть II
Сигнал
В операционной системе процессы имеют изолированное адресное пространство, изолированное исполнение, изолированное планирование и не могут повлиять на другие процессы. Поэтому для общения процессы помимо файловой системы могут использовать сигналы
Сигнал - это сообщение, которое процесс получает от операционной системы или другого процесса. С точки зрения процесса сигнал выглядит как прерывание
Согласно стандарту POSIX, сигналы делятся на стандартные и сигналы реального времени
В Linux всего 31 стандартный сигнал. Рассмотрим самые распространенные из них:
| Имя | Код | Назначение | Действие по умолчанию |
|---|---|---|---|
SIGHUP (от hang up) |
1 | Процесс завершается, а дочерние процессы получает этот сигнал, чтобы тоже завершиться. Ранее использовался для обозначения прерывания телефонной связи между терминалом и пользователем (дословно “положить трубку”) | 🛑 |
SIGINT (от interrupt) |
2 | Прерывание выполнения команд от клавиатуры (в терминале вызывается по комбинации Ctrl+C) | 🛑 |
SIGQUIT |
3 | Прерывание с дампом ядра (обычно Ctrl+\), посылается всем процессам группы | 🛑📦 |
SIGILL (от illegal) |
4 | Сигнал, посланный ядром, который означает, что выполнявшаяся инструкция является неправильной с точки зрения архитектуры процессора | 🛑📦 |
SIGFPE (от floating point exception) |
8 | Ошибочная арифметическая операция | 🛑📦 |
SIGKILL |
9 | Немедленное принудительное завершение процесса | 🛑 |
SIGUSR1 и SIGUSR2 |
10 и 12 | Сигналы, определенные пользователем | 🛑 |
SIGSEGV (от segmentation fault) |
11 | Нарушение доступа к памяти, например, доступ к еще невыделенной странице | 🛑📦 |
SIGPIPE |
13 | Процесс написал в именованный канал, но нет процесса, который мог бы прочитать это | 🛑 |
SIGTERM (от terminate) |
15 | Сигнал завершения | 🛑 |
SIGCHLD, также SIGCLD (от child) |
17 | Дочерний процесс завершился, был остановлен или продолжил исполнение | 🙈 |
SIGCONT (от continue) |
18 | Процесс продолжает исполнение | ▶️ |
SIGSTOP |
19 | Перевод процесса в состояние “Остановлен” | ⏸️ |
SIGTSTP |
20 | Сигнал остановки с терминала по комбинации Ctrl+Z | ⏸️ |
По умолчанию каждый процесс имеет таблицу обработчиков сигналов, наследованную от первого процесса (init или systemd). Такие обработчики обычно могут совершать такие действия:
- 🛑 - завершение исполнение процесса (🛑📦 - завершение с сохранением памяти процесса в момент получения сигнала)
- ⏸️ - процесс останавливает исполнение
- 🙈 - игнорирование сигнала
- ▶️ - продолжение исполнения
Здесь код сигнала указан для архитектур x86 и ARM. В других архитектурах (например, MIPS или SPARC) код сигнала может отличаться
Среди этих все, кроме SIGKILL и SIGSTOP, можно перехватить и переопределить обработчики, например, назначить на SIGINT правильной завершение процесса. На сигналы SIGKILL и SIGSTOP операционная система принудительно убивает или переводит процесс в состояние “Остановлен” соответственно
Сигналы реального времени используются для обычных программ. Они не имеют определенного значения, и всего их может быть до 33 – они определены интервалом от SIGRTMIN (чаще всего 34 или 35) и SIGRTMAX (64). Так как разные имплементации потоков библиотеки glibc используют первые 1 или 2 сигнала для своих задач, рекомендуется использовать SIGRTMIN + 3 вместо 37 или 38
Гарантируется, что сигналы реального времени придут процессу в том же порядке, что они были отправлены. Также, если такой сигнал был послан функцией sigqueue, то процесс-приемник может получить число или указатель на дополнительные данные
Источник: https://www.man7.org/linux/man-pages/man7/signal.7.html
Планирование процессов
Подробнее про планирование процессов описано в курсе “Операционные системы”
За время развития операционной системы Linux существовало множество планировщиков:
- O(n) scheduler, использовавшийся в версиях ядра с 2.4 до 2.6
- O(1) scheduler, использовавшийся в версиях ядра с 2.6 до 2.6.23
- Completely Fair Scheduler (CFS, Полностью справедливый планировщик), использовавшийся долгое время (16 лет) в версиях ядра с 2.6.23 до 6.6
- Earliest eligible virtual deadline first (EEVDF, “С самого раннего подходящего для виртуального дедлайна”), использующийся с версии ядра 6.6
В Linux можно выделить 2 типа процессов:
-
Процессы реального времени - обычно, это демоны ядра. Их выполнение приоритетно, так как от их работы зависит работа остальных процессов, поэтому система выполняет сначала их
Для их исполнения используются алгоритм “Первым пришел - первым обслужен” (FCFS) или циклический алгоритм (Round Robin)
-
Пользовательские процессы. У каждого такого процесса есть собственный приоритет исполнения (значение nice), поэтому для них используются более изощренные алгоритмы, такие как CFS и EEVDF
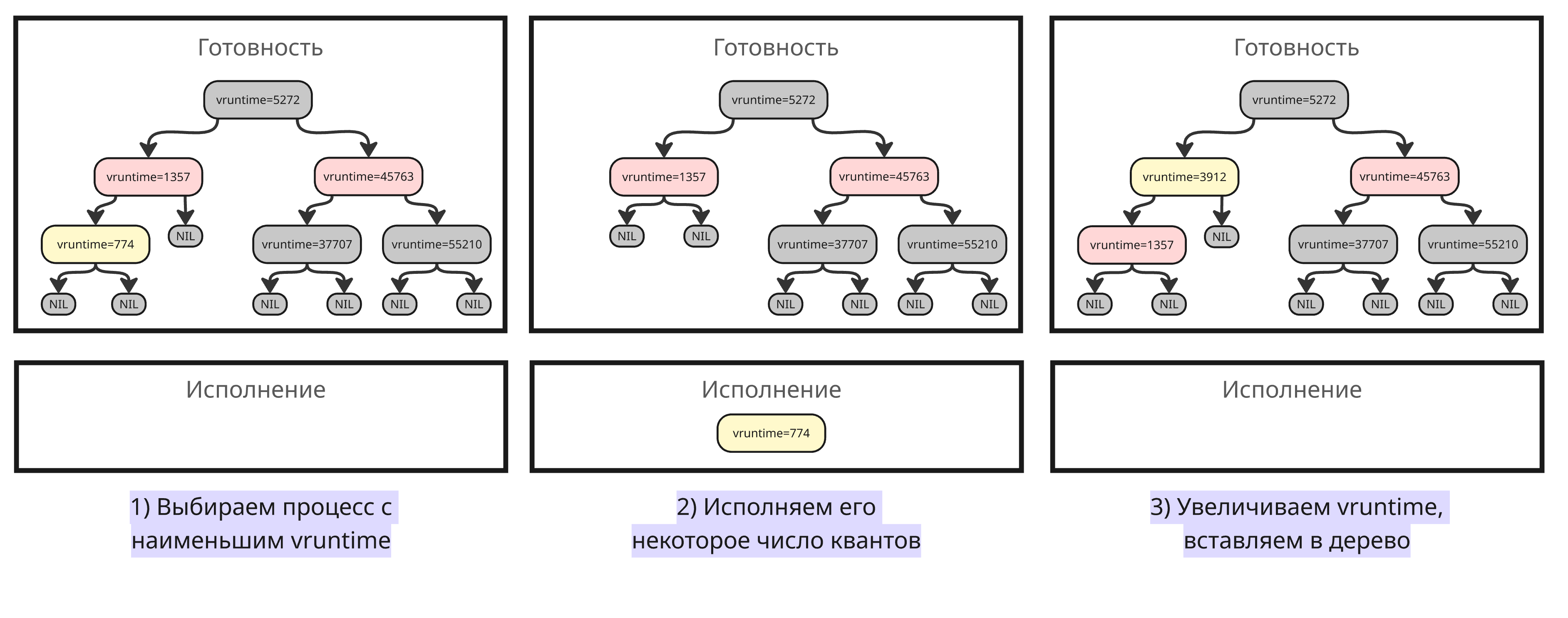
Рассмотрим, как работает Completely Fair Scheduler
Ключевая идея планировщика - каждый процесс должен получать долю процессорного времени, пропорциональную её весу (то есть приоритету). Вместо фиксированных очередей планировщик CFS использует виртуальное время vruntime для каждой задачи
- Когда процесс порождается другим, его виртуальное время
vruntimeустанавливается таким же, как и у его родителя -
После того, как другой процесс исполнялся некоторое число квантов, планировщик находит процесс с наименьшим
vruntimeи начинает его исполнение. Его исполнение заканчивается, если:- Он был остановлен, завершил исполнение или перешел в ожидание ввода/вывода
- Появилась другая задача с меньшим
vruntime - Время его исполнения превысилось некоторое число квантов исполнения (условных единиц). Это число зависит от веса процесса и текущего множества готовых к исполнению процессов
-
После исполнения
delta_execсекунд планировщик обновляетvruntimeпо такой формуле:vruntime += delta_exec * weight / lw.weightЗдесь
weight- вес текущего процесса (примерно1024 / (1.25 ^ nice_value),nice_value- это значение параметра nice), аlw.weight- вес опорной сущности, например, вес для процесса с nice=0 или установленный вес для группы процессов - Выбирается следующий процесс с минимальным
vruntimeи так далее
Сами процессы с vruntime должны где-то храниться, причем операции добавления удаления должны быть быстрыми. По этой причине выбрали красно-черное дерево - процессы отсортированы по величине vruntime, а само дерево является самобалансирующимся, то есть в любой момент времени его высота примерно равна log N, а все операции имеют сложность O(log N)
Подробнее про CFS: https://www.kernel.org/doc/html/latest/scheduler/sched-design-CFS.html, https://developer.ibm.com/tutorials/l-completely-fair-scheduler/
Исходный код CFS: https://github.com/torvalds/linux/blob/v6.5/kernel/sched/fair.c
Completely Fair Scheduler полагался на множество эвристик и параметров, чтобы корректно работать с интерактивными и фоновыми задачами
Новый алгоритм Earliest eligible virtual deadline first вместо этого имеет математический подход. В нем есть три понятия:
- Виртуальное время выполнения, как и в CFS
- Лаг - разница между тем, сколько процессорного времени задача должна была получить (согласно своему приоритету), и тем, сколько она реально получила
- Виртуальный дедлайн - момент времени, к которому задача должна получить свое процессорное время
На каждом шаге EEVDF:
- Находит задачи с положительным лагом. Такие задачи называются подходящими (eligible)
- Среди них выбирает ту, у которой самый ранний виртуальный дедлайн (earliest virtual deadline)
Однако процессы могут кратковременно засыпать, чтобы повышать свой лаг, что делает планировщик несправедливым. Чтобы бороться с этим, планировщик не убирает такие задачи из очереди “Готовность”, а также меньше уменьшает их лаг
Статья про EEVDF: https://citeseerx.ist.psu.edu/document?doi=805acf7726282721504c8f00575d91ebfd750564&repid=rep1&type=pdf
Документация про EEVDF: https://docs.kernel.org/scheduler/sched-eevdf.html
Псевдофайловая система /proc/
Для доступа к сведениям процессов есть псевдофайловая система /proc/, которая представляет из себя набор файлов для каждого процесса. При чтении одного из файлов в этом подкаталоге данные достаются не из диска, а из оперативной памяти
Директория /proc/ содержит множество поддиректорий вида /proc/<PID> с числовыми названиями. Это число представляет из себя идентификатор процесса, а поддиректория хранит информацию о процессе, а именно:
- файл
/proc/<PID>/cmdline- полная командная строка запуска процесса - символьная ссылка
/proc/<PID>/exeна исполняемый файл. Иногда команда запуска может быть видаnano test.sh, где программаnanoможет быть в/bin/nano, а может быть другой утилитой из другого места - символьная ссылка
/proc/<PID>/cwdна текущий каталог, относительного которого процесс исполняется (от current working directory) -
файл
/proc/<PID>/environ, содержащий переменные окружения процесса -
файл
/proc/<PID>/status, содержащий общую информацию о процессе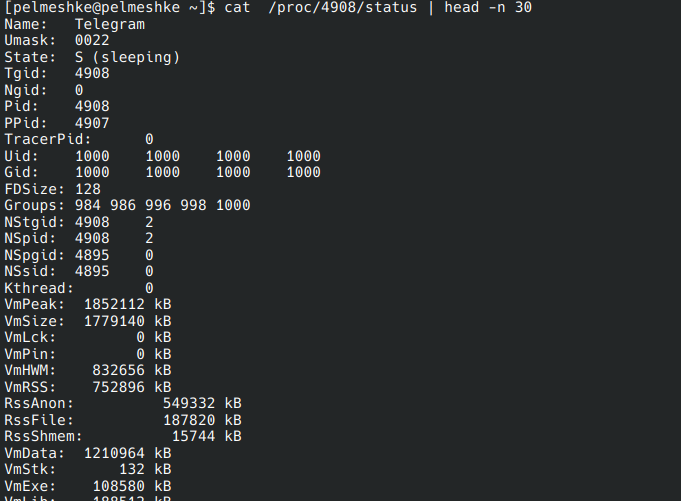
Также есть файл
/proc/<PID>/stat, содержащий статистику в машиночитаемом виде -
файл
/proc/<PID>/io, содержащий статистику операциям хранилища в таком виде:rchar: 131804676 wchar: 1467923 syscr: 30982 syscw: 40879 read_bytes: 296783872 write_bytes: 1097728 cancelled_write_bytes: 8192 -
файл
/proc/<PID>/maps, содержащий информацию о выделенных страницах памяти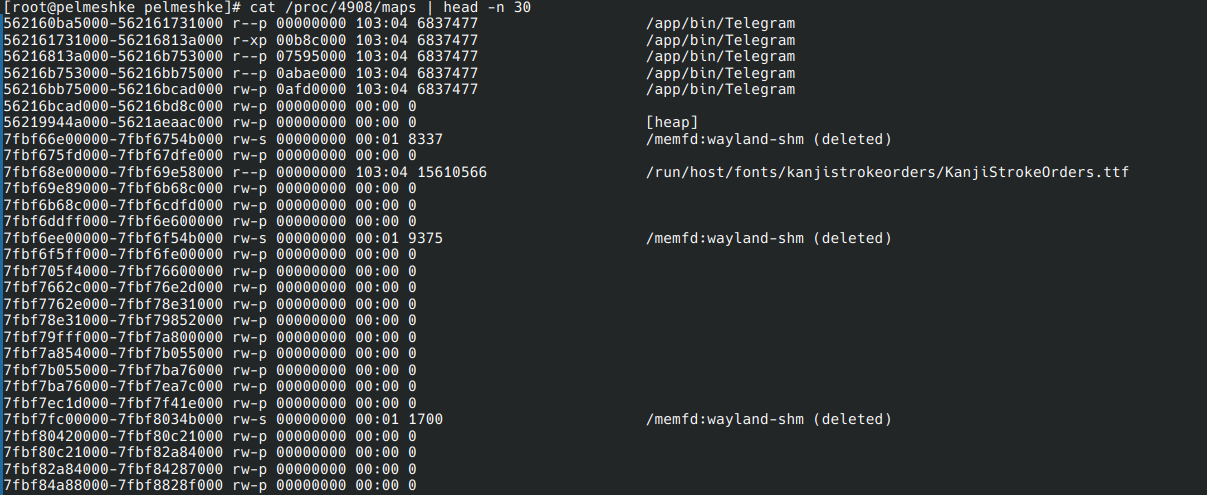
Вместе с ним есть файл
/proc/<PID>/pagemap, который содержит 64-битные числа, представляющие каждую страницу в машиночитаемом виде -
файл
/proc/<PID>/statm, хранящий информацию о размерах структуры памяти процесса в 7 числах. Например:440853 192627 48735 27145 0 300709 0Здесь:
440853- общий размер программы192627- размер резидентной части (та часть используемой памяти, которая находится в ОЗУ)48735- размер разделенной памяти, которая используется несколькими программами27145- размер сегмента, отведенного под код программы0- размер библиотек, не используется с версии ядра 2.6300709- размер данных и стека0- размер грязных страниц, не используется с версии ядра 2.6
-
файл
/proc/<PID>/sched, содержащий статистику планировщика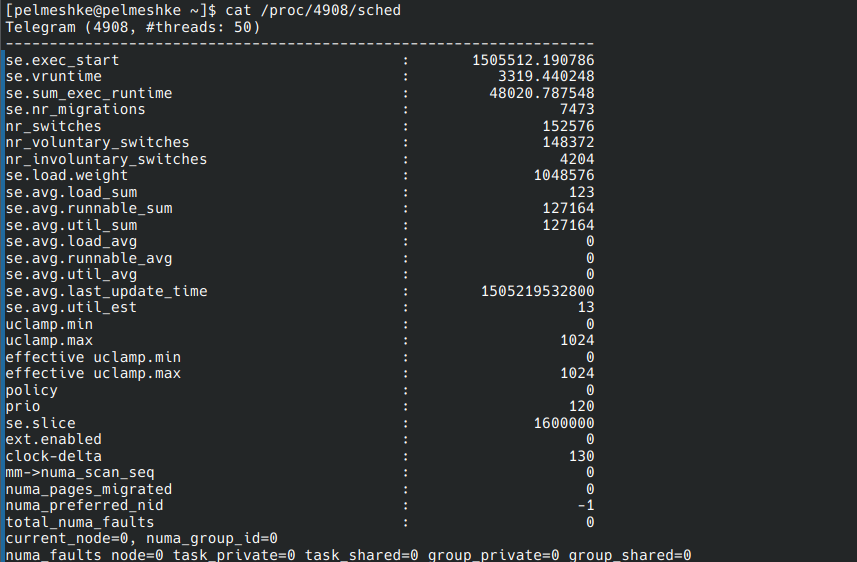
-
директория
/proc/<PID>/fd, содержащая информацию об открытых файловых дескрипторах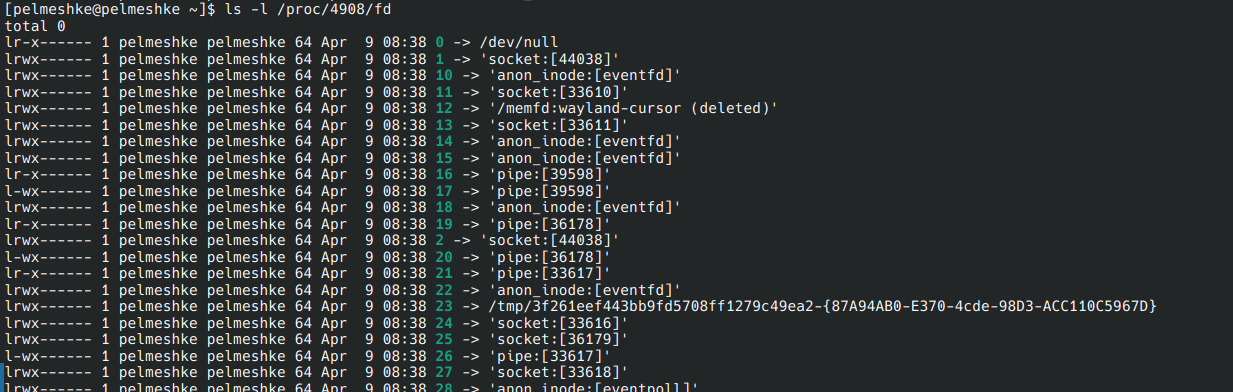
Помимо информации для каждого процесса /proc/ хранит общую информацию об операционной системе
-
Файл
/proc/cmdline- аргументы запуска ядра, например:BOOT_IMAGE=/vmlinuz-linux-zen root=UUID=90811ff5-ecb7-4e78-8406-1be8785fe758 rw loglevel=3 quiet -
Файл
/proc/cpuinfo, содержащий информацию о процессорах: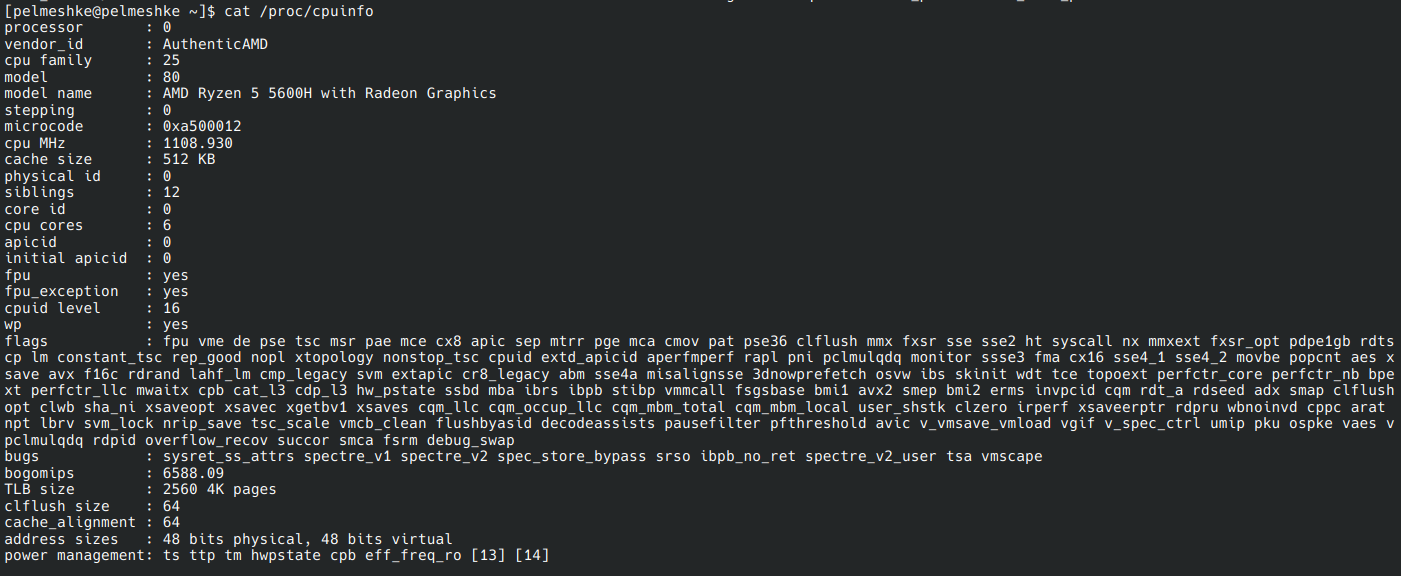
Здесь можно узнать модель процессоров и поддерживаемые инструкции и технологии
- Файл
/proc/diskstats, содержащий статистику операций со всеми дисками -
Файл
/proc/meminfo, содержащий сведения об оперативной памяти: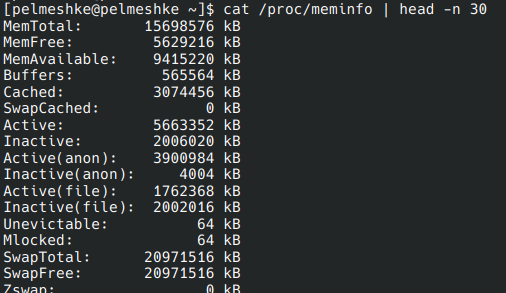
- Файл
/proc/devices- список устройств - Файл
/proc/mounts- список смонтированных файловых систем - Файл
/proc/modules- список загруженный модулей ядра - Файл
/proc/filesystem- список поддерживаемых ядром файловых систем - Файл
/proc/swaps- список разделов подкачки - Файл
/proc/version- версия ядра и дата сборки - Каталог
/proc/sys/kernel/- изменяемые параметры ядра